
«А он как хвать!»
В 2010 году немецкая компания Festo показала устройство Bionic Handling Assistant, которое работало как гибкий захват и напоминало хобот слона. Разработкой устройства занимались инженеры из лаборатории Йохена Штайля. «Хобот» состоял из напечатанных на 3D-принтере деталей. Вначале он хоть и двигался в нужном направлении, но часто промахивался мимо цели. Позднее Штайль и его коллега Матиас Рольф обучили алгоритм контролировать механизм. Теперь программное обеспечение робота фиксирует информацию о позициях каждой части хобота при захвате предмета.
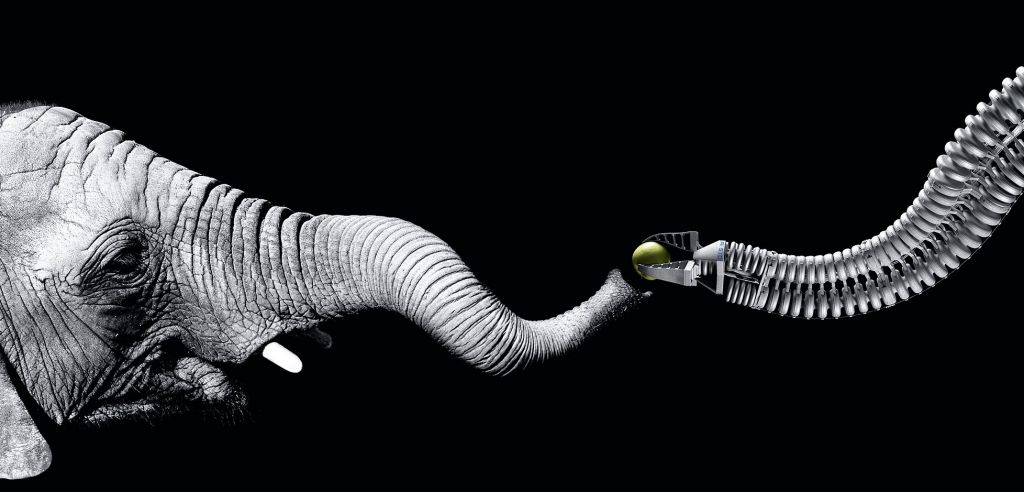
Система определяет перепады давления в тонких пневматических трубках, которые питают искусственные мышцы. Такая схема позволяет соотносить точное положение «мышц» хобота со степенью давления. Хобот «научился» запоминать положение, которое ему придают разработчики. Так как робот передает детали или инструменты «из рук в руки», то он может быть полезен на производствах и в медицине.
По словам создателей, система обеспечивает прямой контакт между роботом и человеком. Сейчас она служит мультитехнологической платформой для разработок в механике, электронике и программном обеспечении. В 2012 году в Bionic Handling Assistant добавили функцию распознавания изображения и речи. Это позволило «хоботу» захватывать объекты самостоятельно без программирования и ручного управления.
На технологической выставке Hannover Messe, которая прошла с 13 по 17 апреля 2017 года в Германии, Festo представила еще одного «хватателя». Им стал манипулятор FlexShapeGripper, который имитировал движение языка хамелеона при охоте на насекомых. Захват роборуки-хамелеона имел особую силиконовую рукавичку. Робот умел аккуратно брать небольшие предметы и крепко удерживать их до сигнала «отпустить». Создатели говорят, что такой робот будет полезен на производственных предприятиях, где нужно перемещать и упаковывать мелкие предметы.
Цельнометаллический пес
Разработка четвероногих роботов для американской армии началась в 2005 году компанией Boston Dynamics. Впервые робота-пса Big Dog показали летом того же года во время масштабных учений морской пехоты в бассейне Тихого океана. Робот патрулировал с военными территорию, передвигался самостоятельно и воспринимал вербальные и невербальные команды морпехов.
Устройство длиной 0,91 м, высотой 0,76 м и весом 110 кг могло носить груз до 154 кг и бегать со скоростью до 6,4 км/ч. Однако «пес» оказался очень шумным и громоздким, и его разработки прекратили в 2015 году.
В 2016 году исследователи представили вторую версию робота под названием Spot. «Пес» прошел испытания на американской военной базе Куантико. Робот заходил в помещения первым, искал врагов и передавал информацию оператору. Механизм стал тише благодаря электродвигателю и управлялся джойстиком по радиоканалу в радиусе полукилометра.
В то же время грузоподъемность второй модели снизилась до 18 кг, а автономность не увеличилась. По этим причинам разработчики и военные не смогли принять робота на вооружение, хотя исследования продолжаются до сих пор.
Незаметные птицы-роботы (Хичкок 2.0)
Первая роботизированная птица SmartBird появилась в 2011 году благодаря той же Festo. Команда разработчиков Bionic Learning Network выбрала в качестве образца чайку. Робот весом 0,45 кг и размахом крыльев 1,96 м умел двигаться, летать и парить подобно своему живому прототипу. Создатели общались со SmartBird по радиосвязи и отслеживали его состояние с помощью камеры.
Позднее Нанкинский университет аэронавтики и астронавтики в Китае выпустил орлоподобного робота «Тянь Инь» для военных целей. В 2017 году голландская технологическая компания Clear Flight Solutions улучшила эту разработку. «Птица» получила название Robird и стала еще больше похожа на оригинал. Пока роботу-орлу необходим оператор для взлета и посадки, а его батареи хватает до 10 минут. В будущем компания планирует отпугивать устройством птиц от аэропортов и сельскохозяйственных угодий.
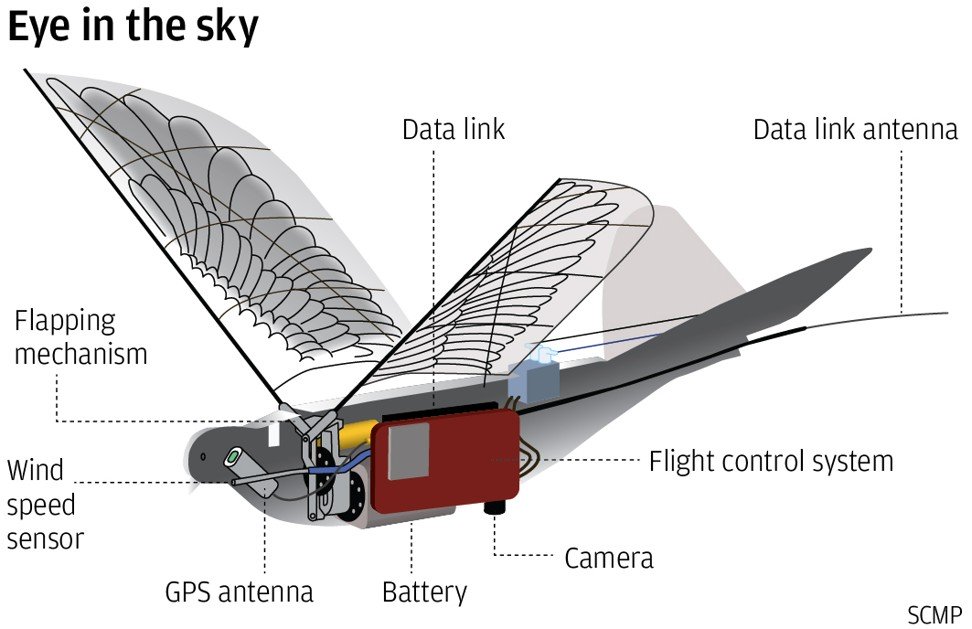
Год спустя китайские инженеры представили робота-голубя Dove, который вошёл в программу «Птицы-шпионы». Исследователи провели почти 2000 испытательных полетов: устройство остается в воздухе до 30 минут и перемещается примерно на 5 км. Дрон имитирует движения крыльев и тел настоящих птиц на 90%.
Dove весит 200 г, имеет размах крыльев около 50 см и летает со скоростью до 40 км/ч. Робота оснастили батареей, камерой высокого разрешения, антенной GPS, системой управления полетом и каналом передачи данных со спутниковой связью. Крылья приводятся в движение с помощью электродвигателя на двух кривошипно-качающихся рычагах. Деформация крыльев создает подъемную силу и силу тяги для движения «голубя» вперед. Специальное программное обеспечение противодействует рывкам в полете для четких фото и видео.
«Голубь» умеет тихо «обманывать» радиолокаторы. Шума устройства не замечают птицы и животные. Технологию хотят внедрить не только в гражданскую авиацию, разведку, полицию и службы ЧС, но и в защиту окружающей среды и городское планирование.
Роботы-осьминоги и электронные щупальца
Итальянские ученые из Института биоробототехники с 2009 по 2017 годы разрабатывали мягкого и гибкого робота-осьминога, который почти не имеет каркаса. Эластичные щупальца из силикона позволяют «моллюску» плавать, передвигаться по песчаному дну и захватывать предметы. Конечности приводит в движение электромотор, который разгоняет осьминога до 20 см/с.
Устройство получило хорошую камеру и звукозаписывающее оборудование. Аппаратура успешно прошла испытания летом 2016 года в Средиземном море. Специалисты заявляют, что их осьминог будет полезен в медицине, строительстве, поиске людей под завалами, в подводных или космических исследованиях.

На год раньше команда исследователей из Университета Саутгемптона, Массачусетского Технологического института (MIT) и Альянса SMART создала другого робота-осьминога. На это раз ученые вдохновились способом передвижения моллюска. Длина корпуса устройства составила 30 см, а его поликарбонатный скелет напечатали на 3D-принтере.
Из всей конструкции движется только гибкая внешняя оболочка, которая «накапливает» энергию. Вода попадает внутрь робота с помощью внешнего насоса и раздувает каркас. Затем выходящая под давлением жидкость продвигает устройство вперёд, и оно делает рывок. За секунду «осьминог» способен преодолеть расстояние в 300 м, а один килограмм груза он разгоняет до 9,7 км/ч. Плавники в хвостовой части робота помогают ему двигаться по прямой, а жёсткий скелет удерживает обтекаемость оболочки. В будущем эту технологию хотят использовать для создания новых подводных и воздушных аппаратов.
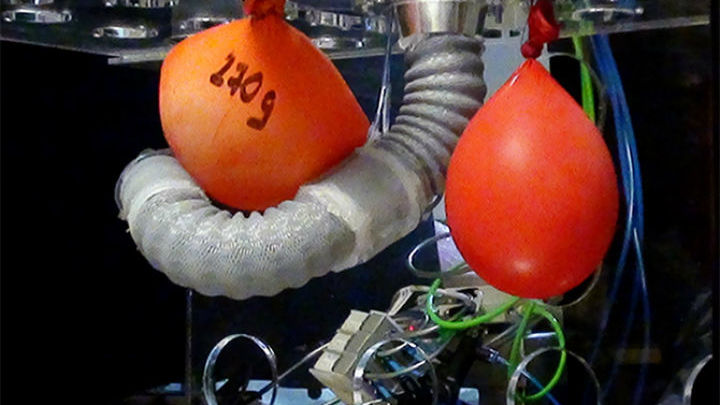
Компания Festo тоже заинтересовалась осьминогами. В 2017 она представила механические щупальца под названием TentacleGripper. Гибкие и мягкие конечности не имеют внутри жестких структур, а вместо воды при сгибе используется сжатый воздух. Вакуумные силиконовые присоски обеспечивают захват и помогают перемещать гладкие и округлые детали разного диаметра. Компания рассчитывает, что OctopusGripper сможет работать вместе с людьми, как бионическая рука BionicCobot и хобот Bionic Handling Assistan.

Итальянский институт биоробототехники создал ещё одно механическое щупальце в 2015 году. Устройство состоит из двух смежных модулей из эластомера, в которых находятся три цилиндрические камеры. Воздух в той или иной из них позволяет сгибать и растягивать модули на 62% в любом направлении до 255 градусов. Когда воздух откачивается, наполнитель в виде гранул во внешней оболочке спрессовывается, и наружная мембрана становится жёсткой с 60% до 200%. Эта технология, по мнению создателей, позволит аккуратно поднимать и удерживать внутренние органы во время операций.
Инженеры ВМС в США в 2014 году испытали робота-рыбу, которая скоро должна стать важной частью подводной разведки и доставлять грузы. Как сообщил «Washington Post», стоимость проекта «Бесшумный Немо» стоила $1 млн. Длина устройства составляет 1,5 м, вес — 45 кг, а само оно может разгоняться до 75 км/ч и погружаться на глубину до 90 м. Робот плавает с помощью движений своего хвоста. Он полностью копирует поведение рыб, делает резкие повороты и двигается бесшумно. Создатели утверждают, что «рыботунцом» возможно управлять дистанционно и переводить в автономный режим.
В 2018 году уже Массачусетский технологический институт (MIT) представили своего робота-рыбу. Устройство создали для исследования подводного мира и его обитателей. Робот двигается как обычная рыба и может находиться на глубине до 18 м, где делает фотографии и снимает видео. Создатели уверяют, что морские жители спокойно реагируют на «самозванку». С суши ею управляют при помощи операторского пульта.
И снова про полеты: робот Бэтмана и бабочки
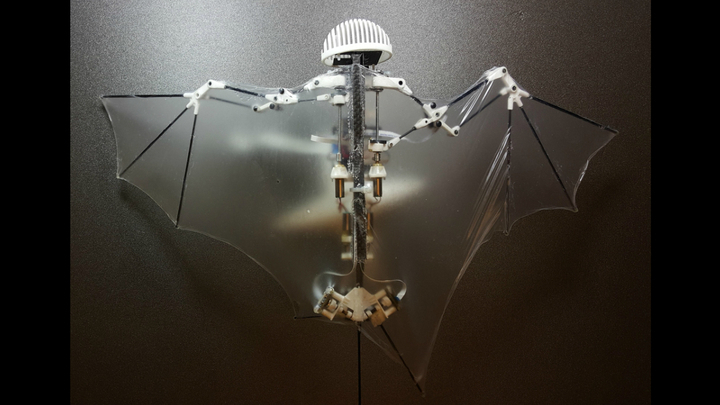
Команда инженеров из Иллинойсского университета в Урбане-Шампейн и Калифорнийского технологического института в 2017 году создала робота-летучую мышь под названием Bat Bot. «Животное» весит 93 г, его длина от головы до хвоста составляет чуть больше 20 см, взмах крыла занимает 1/10 секунды. Движется устройство с помощью микродвигателя в «позвоночнике». Крылья «мыши» шириной 47 см изготовлены из легкого углеродного волокна, а на «скелет» натянули ультратонкую силиконовую мембрану. Крыло меняет форму, и натяжение поверхности при движении сохраняется, что улучшает аэродинамические свойства.
Каждый сустав крыла имеет сенсор, который регистрирует его положение. По результатам тестов, «мышь» развивает скорость до 19 км/ч при обычном полете и до 48 км/ч в пике, однако она так может пролететь всего 30 м. Создатели планируют научить робота висеть вниз головой, оснастить его «глаза» камерами и продлить жизнь батареи. Устройство могут использовать в мониторинге местности, разведке на опасных участках, в поисково-спасательных операциях и доставке лекарств в больничные палаты.
В том же году уже известная нам Festo спустя два года разработок представила бионических бабочек eMotionButterflies. Инженеры создали систему внешнего контроля, которая позволяет роботам следить за ситуацией в режиме реального времени и выстраивать траекторию полёта. При этом «бабочки» могут летать только внутри специального помещения: им необходимы система GPS и десять инфракрасных камер в важных точках полета. У каждого робота в корпусе есть ИК-датчики, которые обеспечивают двустороннюю коммуникацию между ним и центральной системой управления.
«Бабочек» оснастили многочисленными датчиками, гироскопом и даже компасом. Крылья «насекомых» состоят из гибких пленок-конденсаторов, ультралегкого каркаса из тонких графитовых стержней. Максимальный размах крыльев робота — 50 см, частота взмахов приближается к 1-2 Гц, а сама конструкция весит 32 гр. При этом бионические бабочки могут летать со скоростью до 2,5 м/с и зависать в воздухе на 4 минуты до 15-минутной перезарядки. Инженеры планируют применять таких роботов в военном деле и при проведении спасательных операций.
Источники
- Bionic Handling Assistant
- FlexShapeGripper
- Legacy robots
- SmartBird
- China takes surveillance to new heights with flock of robotic Doves, but do they come in peace?
- Clear Flight Solutions
- ROBIRD®: the most effective bird control solution
- This Octopus-Inspired Robot Can Swim, Grasp Objects and Crawl Around
- Ultra-fast escape maneuver of an octopus-inspired robot
- TentacleGripper
- BionicCobot
- A bioinspired soft manipulator for minimally invasive surgery
- В США испытывают робота-рыбу
- Американские ученые создали робота‐рыбу, которая может снимать видео под водой
- A biomimetic robotic platform to study flight specializations of bats
- eMotionButterflies



